
 développement back-end
tutoriel php
Technologie des taches chronométrées et des taches planifiées en PHP
développement back-end
tutoriel php
Technologie des taches chronométrées et des taches planifiées en PHP
Technologie des taches chronométrées et des taches planifiées en PHP
May 11, 2023 pm 04:13 PM
Avec le développement rapide d'Internet, de plus en plus de sites Web et d'applications doivent effectuer certaines taches planifiées et planifiées en arrière-plan, telles que le nettoyage des données, la sauvegarde, l'analyse statistique, etc. En tant que langage de développement Web populaire, PHP fournit également la technologie de tache planifiée et de tache planifiée correspondante. Cet article présentera en détail la technologie de tache planifiée et de tache planifiée en PHP.
1. Le concept et les scénarios d'utilisation des taches planifiées
1.1 Concept
Les taches planifiées font référence à l'exécution automatique de certaines taches ou opérations spécifiées dans un moment ou un intervalle de temps spécifié.
1.2 Scénarios d'utilisation
Dans le développement Web, il est souvent nécessaire d'effectuer certaines taches en arrière-plan qui n'ont pas besoin d'être observées par les utilisateurs, comme compter les visites du site Web chaque mois, sauvegarder la base de données chaque jour, etc. Le temps d'exécution et la fréquence de ces taches sont relativement fixes, et nous pouvons implémenter ces fonctions via des taches planifiées.
2. Technologie des taches planifiées en PHP
PHP offre une variété de fa?ons d'implémenter des taches planifiées. Les deux méthodes basées sur Crontab et basées sur des bibliothèques tierces sont présentées ci-dessous.
2.1 Implémenter des taches planifiées basées sur Crontab
Crontab est un outil utilisé pour effectuer des taches régulièrement dans les systèmes Linux/Unix Grace à lui, nous pouvons implémenter des taches planifiées. Les étapes spécifiques de mise en ?uvre sont les suivantes?:
étape 1?:?Modifiez la table crontab
Ouvrez la table crontab via cron -e et ajoutez les taches planifiées correspondantes, par exemple?:
0 1 * /usr/bin/php /home/yourusername/ cron.php
Exécutez le fichier /home/yourusername/cron.php à 1h du matin tous les jours.
étape 2?: Redémarrez le service cron
$ sudo /etc/init.d/cron restart
De cette fa?on, la tache planifiée est configurée.
2.2 Taches planifiées basées sur des bibliothèques tierces
En plus de Crontab, il existe également des bibliothèques tierces qui peuvent être utilisées pour implémenter des taches planifiées. Ces bibliothèques fournissent généralement des API plus pratiques et conviennent à des taches plus complexes. Les bibliothèques couramment utilisées sont les suivantes?:
2.2.1 Composant Symfony/Console
Le composant Symfony/Console est un composant du framework Symfony utilisé pour gérer les taches de ligne de commande. Pour terminer une tache, vous devez d'abord écrire la classe Command, puis ajouter, modifier, exécuter et d'autres opérations via l'outil de ligne de commande du composant Symfony/Console.
2.2.2 Composant Laravel/Schedule
Le composant Laravel/Schedule est une bibliothèque de gestion de taches planifiées fournie par le framework Laravel. Il fournit une API simple et facile à utiliser pour implémenter diverses taches planifiées, prenant en charge des points temporels et des intervalles de temps. , etc. Plusieurs stratégies de planification.
2.2.3 Composant EasyTask
EasyTask est un composant de gestion de taches planifiées PHP développé par des Chinois. Il est simple et facile à utiliser, prend en charge plusieurs stratégies de planification telles que des points de temps et des intervalles de temps et est très pratique.
3. Concept et scénarios d'utilisation des taches planifiées
3.1 Concept
Les taches planifiées font référence à l'exécution automatique de certaines taches ou opérations spécifiées à un moment donné dans le futur. Contrairement aux taches planifiées, les taches planifiées doivent généralement être exécutées après une certaine période de temps, qui peut être de plusieurs jours ou semaines.
3.2 Scénarios d'utilisation
Les scénarios d'utilisation des taches planifiées sont également assez étendus. Par exemple, dans une plateforme de commerce électronique, si un utilisateur achète un article, la transaction doit être confirmée et expédiée dans un délai spécifié. Ce processus peut être automatiquement complété via des taches planifiées.
4. Technologie des taches planifiées en PHP
La technologie des taches planifiées en PHP est généralement implémentée via CRON. CRON nous permet d'effectuer certaines taches à une heure spécifique ou à un intervalle spécifié, notamment l'exécution de taches à une certaine heure d'un certain jour ou un certain jour d'un certain mois, ou l'exécution de taches de manière cyclique dans un certain intervalle de temps. Ce qui suit décrit comment utiliser CRON pour implémenter des taches planifiées.
4.1 Modifier les scripts de taches planifiées
Semblable aux taches planifiées, nous devons écrire des scripts de taches planifiées spécifiques selon les règles CRON. Les scripts sont généralement constitués de code PHP et s'exécutent automatiquement chaque fois qu'ils doivent être exécutés.
Par exemple, si nous voulons exécuter une tache à midi tous les soirs, nous pouvons éditer un script PHP et le nommer planning_task.php. Le code qu'il contient est le suivant?:
//. Le code qui doit être exécuté
écho "Ceci est une tache planifiée!";
?>
4.2 Configuration de CRON
Ensuite, nous devons configurer le temps d'exécution du script via CRON. Entrez la commande suivante dans le terminal :
crontab -e
Un éditeur de texte s'ouvrira et saisira les règles de taches planifiées suivantes :
0 0 * /usr/bin/php /var/www/html/planned_task. php
Les règles ci-dessus signifient que le script PHP /var/www/html/planned_task.php est exécuté à 0h00 tous les jours.
Après avoir enregistré et fermé l'éditeur, CRON vérifiera les taches planifiées à intervalles planifiés, et si des taches doivent être exécutées, elles seront exécutées selon les règles planifiées.
IV.Résumé
PHP offre une variété de fa?ons d'implémenter des taches planifiées et des taches planifiées, parmi lesquelles la méthode basée sur Crontab peut répondre à la plupart des taches planifiées simples, tandis que la méthode basée sur une bibliothèque tierce est plus adaptée aux taches complexes. et des taches diverses. Lorsque nous utilisons ces technologies, nous devons choisir la mise en ?uvre la plus appropriée en fonction des besoins spécifiques de l'entreprise.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undress AI Tool
Images de déshabillage gratuites

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
échangez les visages dans n'importe quelle vidéo sans effort grace à notre outil d'échange de visage AI entièrement gratuit?!

Article chaud
Outils chauds

Bloc-notes++7.3.1
éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)



 DualBEV?: dépassant largement BEVFormer et BEVDet4D, ouvrez le livre?!
Mar 21, 2024 pm 05:21 PM
DualBEV?: dépassant largement BEVFormer et BEVDet4D, ouvrez le livre?!
Mar 21, 2024 pm 05:21 PM
Cet article explore le problème de la détection précise d'objets sous différents angles de vue (tels que la perspective et la vue à vol d'oiseau) dans la conduite autonome, en particulier comment transformer efficacement les caractéristiques de l'espace en perspective (PV) en vue à vol d'oiseau (BEV). implémenté via le module Visual Transformation (VT). Les méthodes existantes sont globalement divisées en deux stratégies?: la conversion 2D en 3D et la conversion 3D en 2D. Les méthodes 2D vers 3D améliorent les caractéristiques 2D denses en prédisant les probabilités de profondeur, mais l'incertitude inhérente aux prévisions de profondeur, en particulier dans les régions éloignées, peut introduire des inexactitudes. Alors que les méthodes 3D vers 2D utilisent généralement des requêtes 3D pour échantillonner des fonctionnalités 2D et apprendre les poids d'attention de la correspondance entre les fonctionnalités 3D et 2D via un transformateur, ce qui augmente le temps de calcul et de déploiement.
 Connaissez-vous quelques raisons pour lesquelles les taches planifiées de crontab ne sont pas exécutées??
Mar 09, 2024 am 09:49 AM
Connaissez-vous quelques raisons pour lesquelles les taches planifiées de crontab ne sont pas exécutées??
Mar 09, 2024 am 09:49 AM
Résumé de quelques raisons pour lesquelles les taches planifiées crontab ne sont pas exécutées. Heure de mise à jour : 9 janvier 2019 09:34:57 Auteur : Hope on the field Cet article résume et vous présente principalement quelques raisons pour lesquelles les taches planifiées crontab ne sont pas exécutées. tout le monde Des solutions sont données pour chacun des déclencheurs possibles, qui ont une certaine valeur de référence et d'apprentissage pour les collègues qui rencontrent ce problème. Les étudiants dans le besoin peuvent suivre l'éditeur pour apprendre ensemble. Préface : J'ai récemment rencontré des problèmes au travail. La tache n'a pas été exécutée. Plus tard, lors d'une recherche sur Internet, j'ai découvert qu'Internet mentionnait principalement ces cinq incitations?: 1. Le service crond n'est pas démarré n'est pas une fonction du noyau Linux, mais repose sur un cron.
 Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
Le papier Stable Diffusion 3 est enfin publié, et les détails architecturaux sont révélés. Cela aidera-t-il à reproduire Sora ?
Mar 06, 2024 pm 05:34 PM
L'article de StableDiffusion3 est enfin là ! Ce modèle est sorti il ??y a deux semaines et utilise la même architecture DiT (DiffusionTransformer) que Sora. Il a fait beaucoup de bruit dès sa sortie. Par rapport à la version précédente, la qualité des images générées par StableDiffusion3 a été considérablement améliorée. Il prend désormais en charge les invites multithèmes, et l'effet d'écriture de texte a également été amélioré et les caractères tronqués n'apparaissent plus. StabilityAI a souligné que StableDiffusion3 est une série de modèles avec des tailles de paramètres allant de 800M à 8B. Cette plage de paramètres signifie que le modèle peut être exécuté directement sur de nombreux appareils portables, réduisant ainsi considérablement l'utilisation de l'IA.
 Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
Cet article vous suffit pour en savoir plus sur la conduite autonome et la prédiction de trajectoire !
Feb 28, 2024 pm 07:20 PM
La prédiction de trajectoire joue un r?le important dans la conduite autonome. La prédiction de trajectoire de conduite autonome fait référence à la prédiction de la trajectoire de conduite future du véhicule en analysant diverses données pendant le processus de conduite du véhicule. En tant que module central de la conduite autonome, la qualité de la prédiction de trajectoire est cruciale pour le contr?le de la planification en aval. La tache de prédiction de trajectoire dispose d'une riche pile technologique et nécessite une connaissance de la perception dynamique/statique de la conduite autonome, des cartes de haute précision, des lignes de voie, des compétences en architecture de réseau neuronal (CNN&GNN&Transformer), etc. Il est très difficile de démarrer?! De nombreux fans espèrent se lancer dans la prédiction de trajectoire le plus t?t possible et éviter les pièges. Aujourd'hui, je vais faire le point sur quelques problèmes courants et des méthodes d'apprentissage introductives pour la prédiction de trajectoire ! Connaissances introductives 1. Existe-t-il un ordre d'entrée pour les épreuves de prévisualisation ? R?: Regardez d’abord l’enquête, p
 Revoir! Fusion profonde de modèles (LLM/modèle de base/apprentissage fédéré/mise au point, etc.)
Apr 18, 2024 pm 09:43 PM
Revoir! Fusion profonde de modèles (LLM/modèle de base/apprentissage fédéré/mise au point, etc.)
Apr 18, 2024 pm 09:43 PM
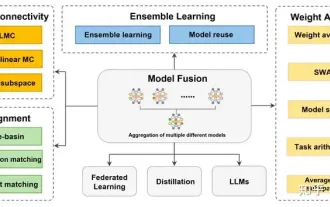
Le 23 septembre, l'article ? DeepModelFusion:ASurvey ? a été publié par l'Université nationale de technologie de la défense, JD.com et l'Institut de technologie de Pékin. La fusion/fusion de modèles profonds est une technologie émergente qui combine les paramètres ou les prédictions de plusieurs modèles d'apprentissage profond en un seul modèle. Il combine les capacités de différents modèles pour compenser les biais et les erreurs des modèles individuels pour de meilleures performances. La fusion profonde de modèles sur des modèles d'apprentissage profond à grande échelle (tels que le LLM et les modèles de base) est confrontée à certains défis, notamment un co?t de calcul élevé, un espace de paramètres de grande dimension, l'interférence entre différents modèles hétérogènes, etc. Cet article divise les méthodes de fusion de modèles profonds existantes en quatre catégories?: (1) ??Connexion de modèles??, qui relie les solutions dans l'espace de poids via un chemin de réduction des pertes pour obtenir une meilleure fusion de modèles initiale.
 Le premier modèle mondial de génération de vidéos de scènes de conduite autonomes multi-vues DrivingDiffusion?: nouvelles idées pour les données et la simulation BEV
Oct 23, 2023 am 11:13 AM
Le premier modèle mondial de génération de vidéos de scènes de conduite autonomes multi-vues DrivingDiffusion?: nouvelles idées pour les données et la simulation BEV
Oct 23, 2023 am 11:13 AM
Quelques réflexions personnelles de l'auteur Dans le domaine de la conduite autonome, avec le développement de sous-taches/solutions de bout en bout basées sur BEV, les données d'entra?nement multi-vues de haute qualité et la construction de scènes de simulation correspondantes sont devenues de plus en plus importantes. En réponse aux problèmes des taches actuelles, la ??haute qualité?? peut être divisée en trois aspects?: des scénarios à longue tra?ne dans différentes dimensions?: comme les véhicules à courte portée dans les données sur les obstacles et les angles de cap précis lors du découpage des voitures, et les données sur les lignes de voie. . Scènes telles que des courbes avec des courbures différentes ou des rampes/fusions/fusions difficiles à capturer. Celles-ci reposent souvent sur de grandes quantités de données collectées et sur des stratégies complexes d’exploration de données, qui sont co?teuses. Valeur réelle 3D - image hautement cohérente?: l'acquisition actuelle des données BEV est souvent affectée par des erreurs d'installation/calibrage du capteur, des cartes de haute précision et l'algorithme de reconstruction lui-même. cela m'a amené à
 GSLAM | Une architecture générale et un benchmark
Oct 20, 2023 am 11:37 AM
GSLAM | Une architecture générale et un benchmark
Oct 20, 2023 am 11:37 AM
J'ai soudainement découvert un article vieux de 19 ans GSLAM : A General SLAM Framework and Benchmark open source code : https://github.com/zdzhaoyong/GSLAM Accédez directement au texte intégral et ressentez la qualité de ce travail ~ 1 Technologie SLAM abstraite a remporté de nombreux succès récemment et a attiré de nombreuses entreprises de haute technologie. Cependant, la question de savoir comment s'interfacer avec les algorithmes existants ou émergents pour effectuer efficacement des analyses comparatives en termes de vitesse, de robustesse et de portabilité reste une question. Dans cet article, une nouvelle plateforme SLAM appelée GSLAM est proposée, qui fournit non seulement des capacités d'évaluation, mais fournit également aux chercheurs un moyen utile de développer rapidement leurs propres systèmes SLAM.
 Plus qu'une simple gaussienne 3D?! Dernier aper?u des techniques de reconstruction 3D de pointe
Jun 02, 2024 pm 06:57 PM
Plus qu'une simple gaussienne 3D?! Dernier aper?u des techniques de reconstruction 3D de pointe
Jun 02, 2024 pm 06:57 PM
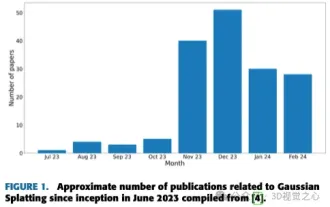
écrit ci-dessus & La compréhension personnelle de l'auteur est que la reconstruction 3D basée sur l'image est une tache difficile qui implique de déduire la forme 3D d'un objet ou d'une scène à partir d'un ensemble d'images d'entrée. Les méthodes basées sur l’apprentissage ont attiré l’attention pour leur capacité à estimer directement des formes 3D. Cet article de synthèse se concentre sur les techniques de reconstruction 3D de pointe, notamment la génération de nouvelles vues inédites. Un aper?u des développements récents dans les méthodes d'éclaboussure gaussienne est fourni, y compris les types d'entrée, les structures de modèle, les représentations de sortie et les stratégies de formation. Les défis non résolus et les orientations futures sont également discutés. Compte tenu des progrès rapides dans ce domaine et des nombreuses opportunités d’améliorer les méthodes de reconstruction 3D, un examen approfondi de l’algorithme semble crucial. Par conséquent, cette étude fournit un aper?u complet des progrès récents en matière de diffusion gaussienne. (Faites glisser votre pouce vers le haut
